Einen Gleichstrommotor mit einer H-Brücke steuern
Einfaches Schalten eines Gleichstrommotors
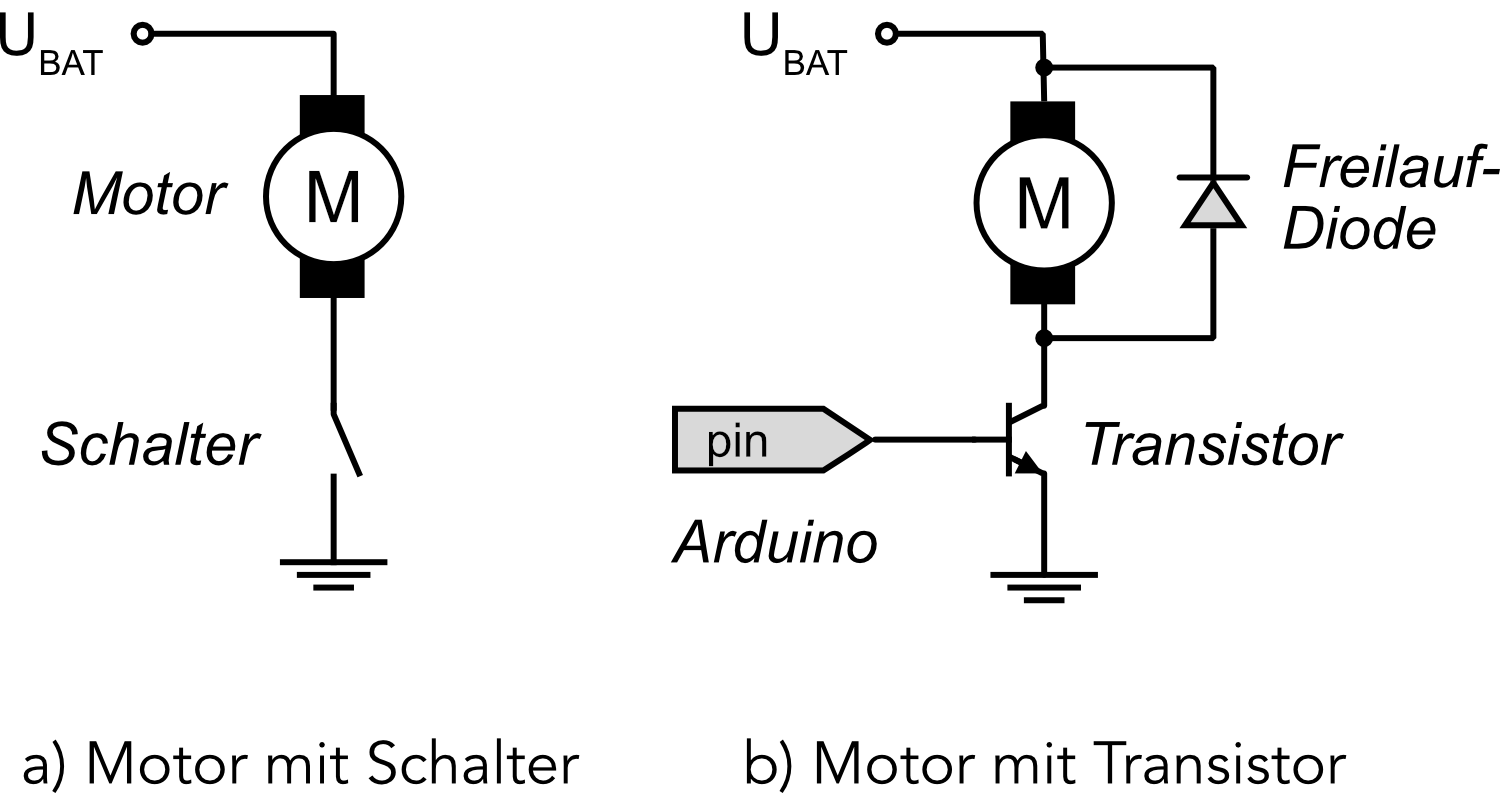
Die einfachste Art zur Ansteuerung eines Gleichstrommotors wäre ein simpler Schalter, der in Reihe zum Motor und der Spannungsquelle liegt (siehe Abbildung a)). Ist der Schalter geschlossen und liegt an dem Motor eine Spannung an, so dreht sich der Motor. Ist der Schalter offen, hört der Motor ganz offensichtlich auf sich zu drehen.
Es ist jedoch zu beachten, dass beim Arduino nur ein Maximalstrom von 40 mA pro Pin erlaubt ist. Der verwendete Elektromotor hat jedoch selbst im Leerlauf eine deutlich höhere Stromaufnahme. Daher darf ein Elektromotor niemals direkt an den Arduino angeschlossen werden.
Ein Elektromotor darf niemals direkt an den Arduino angeschlossen werden. Dies würde den Ardiuno unweigerlich zerstören.
Aus diesem Grund werden Motoren in aller Regel mit elektronischen Schaltern wie zum Beispiel Relais oder Transistoren gesteuert. Elektronische Schalter können mit relativ kleinen Steuerströmen große Lastströme schalten. Der Arduino würde den Steuerstrom zum Schalten des Transistors liefern, während der elektronische Schalter den Motor mit einer separaten Spannungsversorgung verbindet (siehe Abbildunug b)).
Freilaufdiode (flyback diode)
In Abbildung b) ist zusätzlich eine Freilaufdiode parallel zum Motor geschaltet. Motoren, die sich im Betrieb befinden, speichern mit den Motorwicklungen (der Induktivität) elektrische Energie. Das führt dazu, dass der Strom durch einen Motor nicht plötzlich auf Null springen kann. Wird ein Motor von seiner Spannungsversorgung getrennt, so muss sich der Motorstrom erst langsam abbauen. Ist das nicht möglich, können starke, ungewollte Spannungsspitzen auftreten. Diese Spannungsspitzen können deutlich größer sein als die maximal zulässigen Spannungen am Transistor und diesen daher zerstören. Mit der Freilaufdiode ist sichergestellt, dass die in den Wicklungen gespeicherte Energie als elektrischer Strom über die Diode abfließen kann. Spannungsspitzen werden dadurch vermieden.

Einen ausführlichen Artikel zum Thema Gleichstrommotoren gibt es bei heise.de.
H-Brücke
Das einfache Ein- bzw. Ausschalten eines Motor reicht für einen Roboter nicht aus. Hier sollte wenigstens auch die Drehrichtung des Motors geändert werden können.
Die, wegen ihrer Form, so genannte H-Brücke, ist eine weitverbreitete Schaltung, welche auch zum Steuern von Elektromotoren genutzt wird. Die Grundidee der H-Brücke ist es, dass durch sinnvolles Schalten der vier Schalter (S1, S2, S3, S4) die Stromrichtung im Motorzweig geändert werden kann. Dies bedeute auch eine geändert Polarität und eine sich änderende Drehrichtung des Motors.

Linkslauf
Sind die Schalter S1 & S4 geöffnet und die gegenüber liegenden Schalter S2 & S3 geschlossen, so führt das in der Abbildung zu einem Strom nach links. Dadurch dreht sich der Motor z.B. nach links.
Rechtslauf
Wird die Stellung aller Schalter geändert (also S1 & S4 geschlossen und S2 & S3 geöffnet), so dreht sich die Richtung des Strom durch den Motor um und der Motor dreht sich in die entgegengesetzte Richtung.
Bremsen
Neben dem Links- und dem Rechtslauf sollte es auch möglich sein, den Motor zu bremsen. Hierfür müssen die Schalter S1 & S3 geöffnet und die Schalter S2 & S4 geschlossen sein. In diesem Modus ist der Motor von der Spannungsversorgung getrennt. Trotzdem kann aber die in den Motorwindungen gespeicherte Energie abfließen, da sich über die Schalter S2 und S4 ein geschlossener Stromkreis bildet.
Zusätzlich wirkt der Kurzschluss über dem Motor auch als Bremse. Da der Motor sich noch weiter dreht, wird durch den Generatoreffekt eine Spannung erzeugt, welche seiner Ursache entgegenwirkt und die Drehung des Motors abbremst (andernfalls würde der Motor beschleunigen, was offensichtlich nicht passieren kann). Die Rotationsenergie des Motors wird dabei in elektrische Energie umgewandelt und anschließend über den Wicklungswiderstand als Wärme abgegeben.

Praktische Realisierung
In der praktischen Realisierung werden natürlich nicht einfach Schalter, sondern spezielle Transistoren zum Schalten von Strömen verwendet. Im diesem Video wird eine einfache Schaltung vorgestellt, mit der man selber eine H-Brücke zur Motorsteuerung aufbauen kann.
Praktischer ist es jedoch auf fertige Schaltung, so genannten ICs (integrated circuits) zurückzugreifen. Diese Schaltungen werden auch Motortreiber (motor driver) genannt und sind mit den verschiedensten Eigenschaften verfügbar. Eine der bekanntesten Motortreiber-Schaltungen ist der L293. Eine anderer Motortreiber ist der DRV8833, welcher eine deutlich geringere Verlustleitung als der L293D aufweist. Im folgenden wird auf die Verwendung des DRV8833 eingegangen.
Aufgaben
- Erläutern Sie die Funktion der Freilaufdiode.
- Erläutern Sie anhand des Ersatzschaltbildes, warum beim Modus Bremsen der Motor sehr stark abgebremst wird und nicht langsam ausrollt.
- Vergleichen Sie die Datenblätter der beiden Motortreiber L293D und DRV8833 in folgenden Punkten:
- Anzahl der H-Brücken
- Maximaler Ausgangsstrom
- Betriebsspannung